電動式義手とは
モーターとバッテリーにより手先具や継手を駆動させる義手の総称です。その操作にはセンサーやスイッチなどが用いられます。肩甲骨や肩関節、体幹の運動を義手の制御のために利用する「能動式義手」とは異なり、バッテリーを用いるため「体外力源義肢」として分類されることもあります。
スイッチによって動作を制御する電動義手は「スイッチ式電動義手」(JIS)になります。
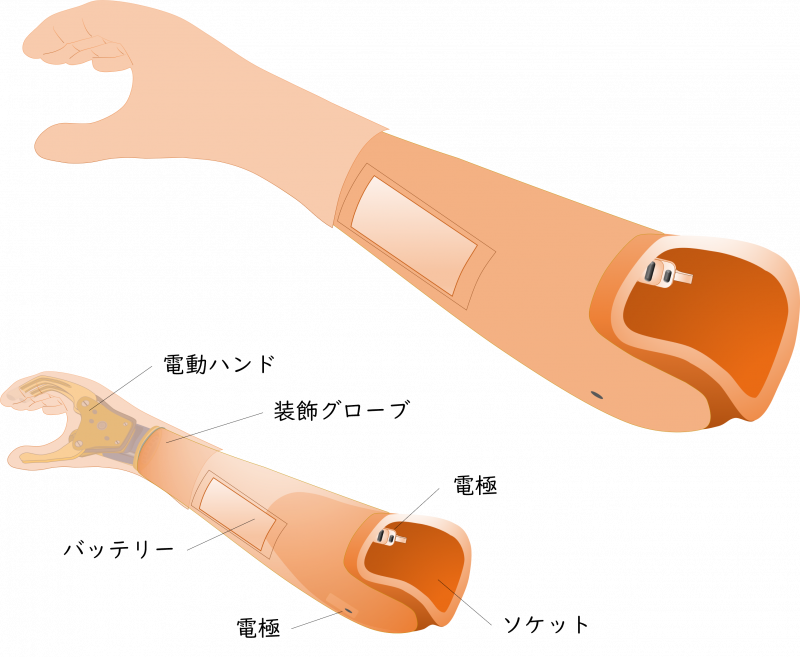
筋電電動義手
筋電電動義手は、筋肉が収縮する時に発生する筋電位を、「電極」を用いてスイッチとして利用し、電動ハンド(手先具)の開閉や、肘継手の曲げ伸ばしを制御する義手です。
筋電電動義手のしくみ
一般的に前腕切断における筋電電動義手の基本操作は、 手首を曲げたり反らせたりを「イメージ」することから始めます。 これは筋電電動義手の電極が、手先具の開閉のために必要とする2チャンネルの筋電位を確実に拾うためには、切断後も残っている手関節背屈筋群(手首を反らすための筋肉)と掌屈筋群(手首を曲げるための筋肉)の運動によ筋電位の発生が最も適しているからです。
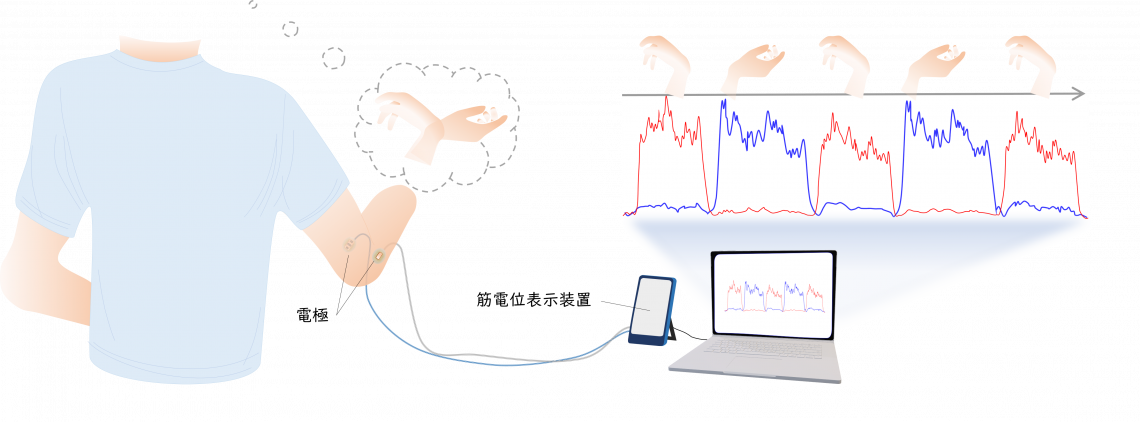
2つの電極をそれぞれ手首を曲げる筋、反らせる筋の走路の上に置き固定します。手首を曲げたり反らせたりをイメージして実際に動かすように力をいれると、それぞれの電極から、手首の動きに対応して発生する筋電位が観察されます。
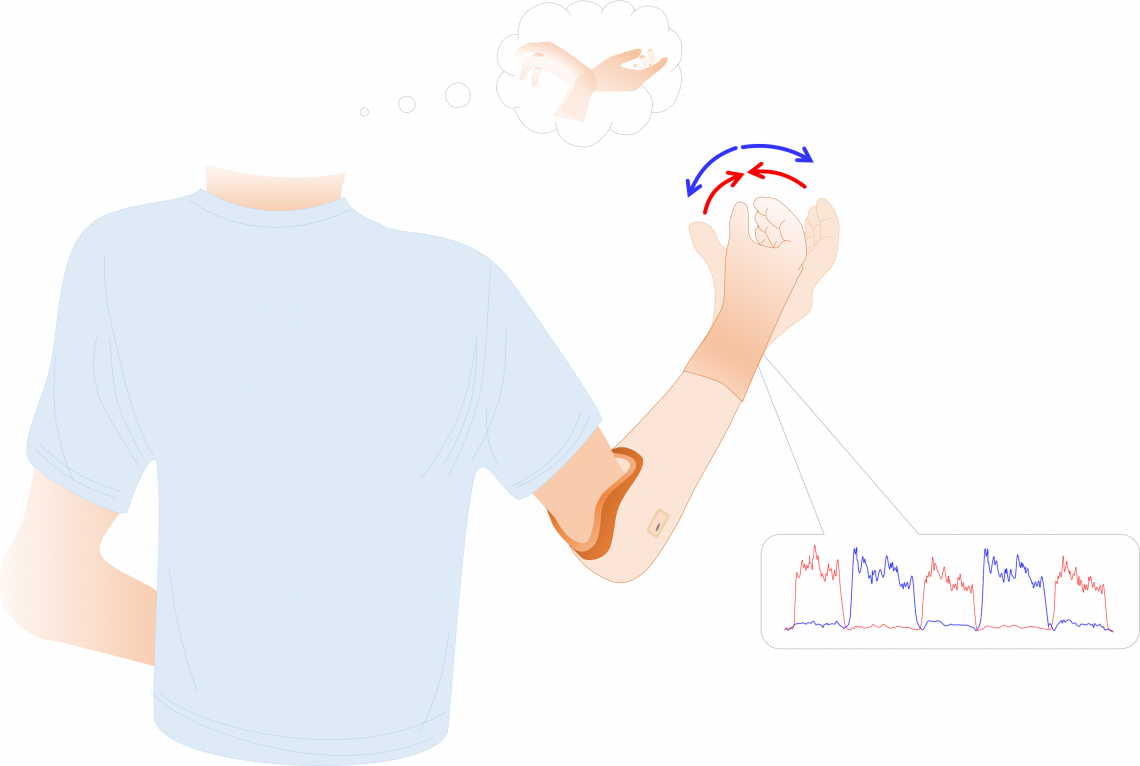
適切な電極の位置が正確に設定された筋電電動義手を装着すると、手首の動きのイメージで発生する信号が、電動ハンドの閉じ開き操作のスイッチとして機能します。