高機能な歩行補助機器の開発
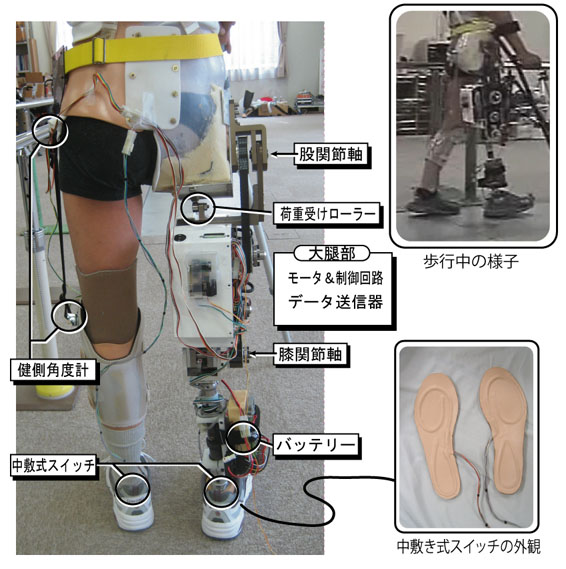
近年の歩行ロボットの多様化から高齢者や歩行困難者への技術的応用の関心が高まっている。そこで課題となる歩行制御システムの人への親和性、つまり現状の歩行制御システムが人の歩行機能と上手く融合しうるのかという点に着目し、動力化した股義足の試作機を用いて、人との親和性が期待される受動歩行システムの要素を取り入れた制御システムで実証を試みている。
本研究では股離断患者の股義足を対象とした機械駆動構造と片方の健常脚との協調歩行制御システムについて制御工学の観点から人との親和性を求めて開発・実証を行っている。